Что бы робот мог объезжать препятствия, ему нужно их видеть. Для того что бы робот стал зрячим обычно используют ультразвуковой датчик измерения расстояния. Дальность действия датчика — 180 см.
Пьезоэлектрический эффект
Принцип действия
Ультразвуковой дальномер определяет расстояние до объектов точно так же, как это делают дельфины или летучие мыши. Он генерирует звуковые импульсы на частоте 40 кГц и слушает эхо. По времени распространения звуковой волны туда и обратно можно однозначно определить расстояние до объекта.
В отличие от инфракрасных дальномеров, на показания ультразвукового дальномера не влияют засветки от солнца или цвет объекта. Но могут возникнуть трудности с определением расстояния до пушистых или очень тонких предметов. Поэтому высокотехнологичную мышеловку выполнить на нём будет затруднительно.
При отражении звука от препятствия мы слышим эхо. Летучая мышь использует отражение ультразвуковых волн для полётов в темноте и для охоты на насекомых. По такому же принципу работает эхолот, с помощью которого измеряется глубина воды под днищем корабля или поиск рыбы.
Принцип передачи и приема ультразвуковой энергии лежит в основе многих очень популярных ультразвуковых датчиков и детекторов скорости. Ультразвуковые волны являются механическими акустическими волнами, частота которых лежит за пределами слышимости человеческого уха — более 20 кГц. Однако сигналы этих частот воспринимаются некоторыми животными: собаками, кошками, грызунами и насекомыми. А некоторые виды млекопитающих, таких как летучие мыши и дельфины, общаются друг с другом ультразвуковыми сигналами.
УЛЬТРАЗВУКОВОЙ ДАТЧИК Lego Mindstorm EV 3. ЗРИ В КОРЕНЬ

Технические спецификации и особенности продукта:
-
- Измерение расстояния в диапазоне от 1 до 250 см
- Точность измерения до +/- 1 см
- Передняя подсветка в виде красного кольца горит постоянно при передаче сигнала и мигает при прослушивании эфира
- Если ультразвуковой сигнал распознан, датчик возвращает логическое значение «Истина»
- Автоматическая идентификация производится программным обеспечением микрокомпьютера EV3
Рис. 1 Ультразвуковой датчик Lego Mindstorm EV 3 (стоимость вместе с внутренним микроконтроллером и микросхемами усиления сигнала $50, при себестоимости $5)

Рис. 2 Схема ультразвукового датчика Lego Mindstorm EV 3 (ultrasonic sensor hardware schematics) построена на микроконтроллере STM8S103F3
- Введение в микроконтроллеры stm8
- Микроконтроллер STM8S103F3
- Схема центрального микроконтроллера LEGO MINDSTORMS EV3 programmable brick main hardware schematics


Рис. 3 Ультразвуковые излучатель AW8T40 и приемник AW8R40 ультразвукового датчика Lego Mindstorm EV 3
Ультразвуковой датчик HC-SR04
Ультразвуковой датчик HC-SR04 — Ultrasonic Ranging Module HC — SR04 — Ultrasonic Sensor Distance Measuring Module — Sonar
Ультразвуковой дальномер HC SR04 самый известный датчик для применения в Arduino, Raspberry Pi, ESP8266 и ESP32 модулях. Позволяет измерять расстояние до объекта в диапазоне от 2 до 400 (180) см. Например, если вы хотите собрать робота, который объезжает преграды, то данный дальномер прекрасно подойдет для ваших задач. Датчик имеет небольшие габариты и простой интерфейс.
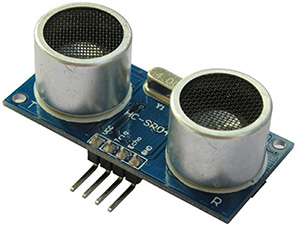
Названия выводов и ультразвуковых излучателей модуля
- Vcc — положительный контакт питания.
- Trig — цифровой вход. Для запуска измерения необходимо подать на этот вход импульс (логическую единицу) длительностью 10 мкс. Следующий импульс рекомендуется подавать не ранее чем через 50 мс. что связано со временем обработки первого импульса.
- Echo — цифровой выход. После обработки отраженного сигнала, на этот выход будет подан импульс (логическая единица), длительностью пропорциональной расстоянию до объекта.
- GND — отрицательный контакт питания (земля).
- Левый ультразвуковой излучатель (маркирован буквой Т — transmiter) это передатчик ультразвукового сигнала, правый ультразвуковой излучатель (маркирован буквой R — resiver) это приемник отраженного от объекта ультразвукового сигнала (эха).
Характеристики
- Напряжение питания: 5 В. Модель HC-SR04 + работает в диапазоне от 3,3В-5В (помечено как HC-SR04 + на задней стороне платы модуля)
- Потребление в режиме тишины: 2 мА
- Потребление при работе: 15 мА
- Максимальная частота опроса датчика: 20 Гц (Период опроса 50 мс)
- Частота ультразвука: 40 кГц
- Дальность обзора: 2 см – 4 м (1,8 м)
- Разрешение (градация выходного сигнала): 0,3 см
- Эффективный угол наблюдения: 15°
- Рабочий угол наблюдения: 30°
- вес — 8,28 грамм
- Размеры: 45*20*15 мм. ДхШхГ (Ш — без учета контактов подключения)

Рис. 5 Размеры ультразвукового датчика HC-SR04
- Внимание:
! Модуль не рекомендуется подключать непосредственно к подключенной к электропитанию плате микроконтроллера, необходимо отключить электропитание в момент подключения модуля , первым должен быть подключен вывод GND модуля, в противном случае,это может повлиять на нормальную работу модуля. - ! При испытании модуля на дальность и точность измерения, размер площади объекта сканирования должен не менее 0,5 квадратных метров и его поверхность должна быть как можно тверже и ровнее, в противном случае, это будет влиять на результаты измерений.
![]()

Рис. 6 Диаграмма направленности ультразвукового датчика HC-SR04. Взята из документации на этот датчик
Описание работы:
Тест угла обзора датчика, взят из описания с сайта:
Ультразвуковой датчик расстояния определяет расстояние до объекта, измеряя время отображения звуковой волны от объекта. Частота звуковой волны находится в пределах частоты ультразвука, что обеспечивает концентрированное направление звуковой волны, так как звук с высокой частотой рассеивается в окружающей среде меньше. Типичный ультразвуковой датчик расстояния состоит из двух мембран, одна из которых генерирует звук, а другая регистрирует отображенное эхо. Образно говоря, мы имеем дело со звуковой колонкой и микрофоном. Звуковой генератор создает маленький, с некоторым периодом ультразвуковой импульс и запускает таймер. Рисунок 3 – Ультразвуковой датчик расстояния HC-SR04 Вторая мембрана регистрирует прибытие отображенного импульса и останавливает таймер. От времени таймера по скорости звука возможно вычислить пройденное расстояние звуковой волны. Расстояние объекта приблизительно половина пройденного пути звуковой волны. Рисунок 4 –Принцип работы ультразвукового датчик расстояния Ограничения, связанные с применением ультразвукового датчик расстояния : 1. Частичные отражения, или как их называют паразитный эхо-сигнал, могут исказить результаты измерений (причиной могут стать криволинейные или наклонные по отношению к направлению излучения сигнала поверхности). 2. Измерения объектов из звукопоглощающих, изоляционных материалов или имеющих тканевую (шерстяную) поверхность могут привести к неправильным измерениям вследствие поглощения (ослабления) сигнала. 3. Чем меньше объект, тем меньшую отражающую поверхность он имеет. Это приводит к более слабому отраженному сигналу. 4. При высокой влажности (дождь, снег) сигнал также может частично отражаться от капель (снежинок), что приводит к паразитному эхо- сигналу.
Принцип работы датчика следующий: один из пьезоэлементов излучает ультразвуковую волну при подачи импульса длительностью 15 микросекунд, а другой пьезоэлемент принимает эту же отражённую волну от препятствия. Затем замеряется время задержки от передачи до приёма волны, далее вычисляется расстояние и передаётся сигнал на ногу Echo датчика, длительностью пропорциональной расстоянию до препятствия. Нам остаётся только подавать импульс на датчик, принять его и вычислить расстояние. Сегодня мы научимся работать с HC-SR04 на BASCOM-AVR.
Поставим перед собой задачу: собрать устройство, которое должно замерять расстояние до какого либо объекта с помощью датчика HC-SR04 и передавать данные через UART на ПК.
Для этой цели можно использовать практически любой AVR микроконтроллер, так как алгоритм очень простой. Я взял Atmega8, в итоге получилась следующая принципиальная схема устройства:

Описание принципа работы ультразвукового дальномера HC—SR04 можно разделить на следующие шаги:
Следующий импульс может быть излучён, только после исчезновения эха от предыдущего. Это время называется периодом цикла (cycle period). Рекомендованный период между импульсами должен быть не менее 50 мс.
Если на сигнальный пин (Trig) подаётся импульс длительностью 10 мкс, то ультразвуковой модуль будет излучать восемь пачек ультразвукового сигнала с частотой 40кГц и обнаруживать их эхо. Измеренное расстояние до объекта пропорционально ширине эха (Echo) и может быть рассчитано по формуле, приведённой на графике выше.
Датчик отправляет ультразвуковые импульсы и слушает эхо. На вход Trig датчика подаем импульс высокого уровня длительностью 10–15 микросекунд. Датчик отправляет ультразвуковой сигнал «chirp» из восьми коротких импульсов частотой выше предела диапазон слуха человека. Электроника датчика знает скорость звука в воздухе. Измеряя время между отправленным и принятым ультразвуком, ультразвуковой датчик HC-SR04 формирует выходной сигнал. Этот принцип эхолокации используют дельфины и летучие мыши. Спустя примерно микросекунду ультразвуковой датчик HC-SR04 выдает на выходе Echo импульс высокого уровня длительностью до 38 миллисекунд. Если препятствий не обнаружено, то на выходе будет сигнал с длительностью 38 мс. Таким образом, для работы с датчиком от электроники прибора требуется один цифровой управляющий выход и один вход для сигнала датчика. Длина импульса на выходе Echo пропорциональна расстоянию до препятствия. Расстояние вычисляется по формуле: S=F/58, где S – расстояние в сантиметрах, F – продолжительность импульса в микросекундах. Для взаимодействия Arduino с датчиком есть программная библиотека Ultrasonic.
Шаг 1: На вход Trig подаётся импульс длительностью 10 микроСекунд. Для дальномера это команда начать измерение расстояния перед ним.
Шаг 2: Устройство генерирует 8 ультразвуковых импульсов с частотой 40 кГц через выходной сенсор T.
Шаг 3: Звуковая волна отражается от препятствия и попадает на принимающий сенсор R.
Шаг 4: На выходе Echo формируется импульс, длительность которого прямо пропорциональна измеренному расстоянию.
Шаг 5: На стороне управляющего контроллера переводим длительность импульса Echo в расстояние по формуле: ширина импульса(мкс) / 58 = дистанция (см).
Ниже на рисунке приведены временные диаграммы, наглядно поясняющие перечисленные шаги.
На сигнал Trig нужно подавать короткие импульсы длительностью 10мкс. Этот импульс запускает эхо-локатор. Он уже сам генерирует пачку ультразвуковых импульсов (40кГц) для излучателя и сам ловит отраженное эхо. По времени распространения звука туда и назад датчик определяет расстояние. Нам же сам датчик на контакт Echo выдает импульс с длительностью пропорциональной расстоянию. Длительность сигнала Echo от 150мкс до 25мс. Если ответа нет, то длительность Echo около 40мс. Расстояние до объекта можно вычислить разделив длительность в микросекундах эха на 58. Получаются расстояние в сантиметрах. Максимальное расстояние, которое можно мерить судя по документации — 5 метров.
Рекомендуемый период опроса датчика 50-10мс. Диаграмма направленности датчика не очень острая — примерно градусов под тридцать.
- Действие ультразвукового дальномера HC-SR04 основано на принципе эхолокации. Он излучает звуковые импульсы в пространство и принимает отражённый от препятствия сигнал. По времени распространения звуковой волны к препятствию и обратно определяется расстояние до объекта.
Запуск звуковой волны начинается с подачи положительного импульса длительностью не менее 10 микросекунд на ножку TRIG дальномера. Как только импульс заканчивается, дальномер излучает в пространство перед собой пачку звуковых импульсов частотой 40 кГц. В это же время запускается алгоритм определения времени задержки отражённого сигнала, а на ножке ECHO дальномера появляется логическая единица. Как только датчик улавливает отражённый сигнал, на выводе ECHO появляется логический ноль. По длительности этого сигнала («Задержка эхо» на рисунке) определяется расстояние до объекта.
Диапазон измерения расстояния дальномера HC-SR04 — до 4 метров с разрешением 0,3 см. Угол наблюдения — 30 градусов, эффективный угол — 15 градусов. Ток потребления в режиме ожидания 2 мА, при работе — 15 мА. - Запуск звуковой волны начинается с подачи положительного импульса длительностью не менее 10 микросекунд на ножку TRIG дальномера. Как только импульс заканчивается, дальномер излучает в пространство перед собой пачку звуковых импульсов частотой 40 кГц. В это же время запускается алгоритм определения времени задержки отражённого сигнала, а на ножке ECHO дальномера появляется логическая единица. Как только датчик улавливает отражённый сигнал, на выводе ECHO появляется логический ноль. По длительности этого сигнала («Задержка эхо» на рисунке) определяется расстояние до объекта.
Диапазон измерения расстояния дальномера HC-SR04 — до 4 метров с разрешением 0,3 см. Угол наблюдения — 30 градусов, эффективный угол — 15 градусов. Ток потребления в режиме ожидания 2 мА, при работе — 15 мА. 
Рис. 40. Пьезоэлектрический ультразвуковой преобразователь: А — входное напряжение приводит к изгибу элемента, что вызывает генерацию ультразвуковых волн. И наоборот, в результате воздействия волн на выходе преобразователя появляется напряжение; Б — ультразвуковой преобразователь с открытой апертурой для работы в воздухе
- Подробнее: https://www.kakprosto.ru/kak-918792-kak-podklyuchit-ultrazvukovoy-dalnomer-hc-sr04-k-arduino#ixzz4PeP45Mxx
- Контакты, по порядку слева направо, с лицевой стороны:
- Vcc – питание 5В
- Trig – вход
- Echo – выход
- Gnd –земля
Процесс работы:
- Подключаем датчик к питанию и к управляющему устройству
- Посылаем на вход дальномера (Trig) сигнал длительностью 10мкс (или чуть больше, он срабатывает с 10мкс)
- Динамик датчика издает 8 сигналов частотой 40кГц, и микрофон получает их эхо (или не получает)
- Датчик подает на свой выход (Echo) сигнал длительностью соответствующей расстоянию до препятствия: 150мкс (при 2см до препятствия) – 25мс (при 4м до препятствия) и 38мс при отсутствии преграды. На заметку: звук проходит расстояние 4см (2см от динамика до препятствия и 2см обратно до микрофона) за 0.04м / 335м/с = 0,000119с=119мкс и 8м за 8м / 335м/с = 0,023881с = 23,881мс.
Какое время проходит от срабатывания датчика по входному сигналу до начала пункта 3 и от начала пункта 3 до начала пункта 4 нигде не сказано – это скоро будет выяснено мной опытным путём.
Для расчета расстояния до препятствия используются следующие формулы:
- Длина выходного импульса в микросекундах / 58 = расстояние в сантиметрах
- Длина выходного импульса в микросекундах / 148 = расстояние в дюймах

Схема модуля HC-SR04 имеет 2 преобразователя ультрозвуковых сигналов в электрические сигналы малой мощности, один TCT40-16T — (T — Transmiter на схеме обозначен как Emit MK2 смотри схему) предназначен для передачи (эмиссии) ультразвуковых волн в окружаюшее пространство а второй TCT40-16R (R — Receive на схеме обозначен как Receive MK1 смотри схему) для приема отраженных ультрозвуковых волн от предметов окружающего мира.

Для передачи ультразвуковых волн требуется относительно высокое напряжение. Микросхема MAX232 (обозначение на плате — U3 смотри схему) усиливает 5 вольт входного питающего напряжения до +/- 9-10 вольт. Микросхема MAX232 подключается между двумя выходами ( T OUT1 — вывод 14 и T OUT2 вывод 7 смотри схему) , так что на самом деле амплитуда значения напряжения импульсов подающихся на ультрозвуковой передатчик достигает до 20 вольт. Питание подается на микросхему MAX232 через транзистор Q2 (в новой схеме отсутствует и питание подается напрямую на вход 16 микросхемы и в этом случае отключения микроконтроллером не происходит) некоторое время до и во время излучения импульса , так как внутреннее переключение заряда создает избыточный шум на приемной стороне модуля. Когда модуль переходит в режим приема на микросхеме MAX232 отключается питание выходом 10 — Signal микроконтроллера EM78P153S (EM78P153S китайский микроконтроллер работает на частоте < 27 МГц .
Прием и выделение электрических импульсов поступающих с преобразователя ультразвуковых сигналов TCT40-16R осуществляется микросхемой LM324 (обозначение на плате — U1 смотри схему) , который содержит 4 операционных усилителя. Операционный усилитель U2D (смотри схему) усиливает сигнал в 6 раз. Операционный усилитель U2C имея обратную связь (1 — го порядка) является полосовым фильтром , затем операционный усилитель U2B усиливает входной сигнал еще 8 раз. Последний операционный усилитель U2A используется вместе с Q1 в качестве гистерезиса компаратора где происходит выделение прямоугольных импульсов и аналогового входного сигнала. Я моделировал фильтр в PSpice и не центрирована 40KHz , как это должно быть , но вместо этого он имеет пик 18kHz. Изменяя только два резистора (R13 до 2K2 и R11 до 18К) отклик фильтра смещается на частоту пульса , и это значительно повышает чувствительность обнаружения.
МИКРОКОНТРОЛЛЕР ESP-8266 И УЛЬТРАЗВУКОВОЙ ДАТЧИК HC-SR04
Переделка ультразвукового датчика HC-SR04



Рис. 4 Ультразвуковой излучатель/приемник TCT40-16R/T (стоимость вместе с внутренним микроконтроллером и микросхемами усиления сигнала < $1 )

Рис. 5 Пространственная диаграмма излучения ультразвукового излучателя/приемника TCT40-16R/T (если бы мы видели ультразвук, то так бы мы видели распространение ультразвуковых волн в пространстве)
Характеристики ультразвукового излучателя/приемника TCT40-16R/T
1. Model: TCT40-16R/T (16 мм в диаметре)
2. Номинальная частота (Кгц): 40 КГц
3. Излучение At10v звукового давления (дб = 0.02mPa): ≥ 117dB
4. чувствительность Приемника at40KHz (дб = V/ubar): ≥-65dB
5. Электростатический потенциал at1KHz, < 1 В (PF): 2000 ± 30%

Ультразвуковые преобразователи справка 1
Ультразвуковые преобразователи справка 2
ПРИМЕНЕНИЕ
Эхолот. Рубрика «Как это работает?»
Ультразвуковые датчики Murata




 Датчики, предназначенные для автоматов парковки, имеют высокую чувствительность: при резонансной частоте, равной 40 кГц. Дальность действия датчика достигает 1,5 метров при разрешающей способности 9 мм. Выпускаются датчики с различной диаграммой направленности, как симметричной (круговой), так и не симметричной (овальной).
Датчики, предназначенные для автоматов парковки, имеют высокую чувствительность: при резонансной частоте, равной 40 кГц. Дальность действия датчика достигает 1,5 метров при разрешающей способности 9 мм. Выпускаются датчики с различной диаграммой направленности, как симметричной (круговой), так и не симметричной (овальной).
Подключение к Arduino
Если вы планируете использовать ультразвуковой дальномер HC-SR04 с Arduino вы можете воспользоваться существующими библиотеками:
- Ultrasonic — самая популярная библиотека для HC-SR04.
- NewPing — отличается большей точностью и скоростью работы.
- Ультразвуковой дальномер URM37
Распиновка:
- Vcc — положительный вывод питания
- TRIG — вход TRIG
- ECHO — выход ECHO
- GND — ноль питания
На выводы питания подается постоянное напряжение 5 В, потребляемый ток в рабочем режиме около 15 мА.
Вход TRIG подключается к любому выводу микроконтроллера. На этот вывод нужно подавать импульсный цифровой сигнал длительностью 10 мкс. По сигналу на входе TRIG датчик посылает ультразвуковые импульсы.
После приема отраженного сигнала, датчик формирует на выводе ECHO импульсный сигнал, длительность которого пропорционально расстоянию до преграды.
Контакты датчика можно соединить с макетной платой или Arduinoпроводами «мама-папа». А с Troyka Shield через провода «мама-мама».
- Гаражный парктроник
Этот дальномер может служить прекрасным датчиком для робота, благодаря которому он сможет определять расстояния до объектов, объезжать препятствия, или строить карту помещения. Его можно также использовать в качестве датчика для сигнализации, срабатывающего при приближении объектов.
Технические характеристики
https://www.yourmestudio.com/rcw-0002-ultrasonic-ranging-module-p717.html
- Напряжение питание: 5 В
- Потребление в режиме тишины: 2 мА
- Потребление при работе: 15 мА
- Диапазон расстояний: 2–400 см
- Эффективный угол наблюдения: 15°
- Рабочий угол наблюдения: 30°
Описание продукта:
ТК T 40-16 т/r 1
-
(Tc): piezoceramics Ультразвуковой датчик
-
(T): Категория t-общность
-
(40): Центральная частота (кгц)
-
(16): наружный диаметр? (мм)
-
(T): использование режим: излучатель; r-приемник; tr-совместимость излучатель и приемник
-
(1): ID — 1,2, 3…
Тестирования цепи
- 1 синусоидальный генератор 1 охватил сигнала Генератор
- 2 cymometer 2 Частотомер
- 3 стандартных динамик 3 вольтметр
- 4 Получить модель датчика 4 излучают модель датчика
- 5 осциллографа 5 Стандартный микрофон
- 6 аудио частотные характеристики Дисплей прибора
Производительность продукта
1). Номинальная частота (кГц): 40 кГц
2). излучать звук pressureat10V (= 0.02Mpa):? 117dB
3). Прием Чувствительность приемника at40KHz (дБ = v/ubar):?-65dB
4). Электростатический потенциал at1KHz, <1 В (PF): 2000 +/-30%
5). Диапазон обнаружения (м): 0.2 ~ 20
6).-6дБ угол направления: 80o
7). Обшивка материал: алюминий
8). Обшивка ЦВЕТ: серебристый
Полезные ресурсы:
Ультразвуковой дальномер HC-SR04 подключение к Arduino
Ультразвуковой датчик HC-SR04 – дальномер на микроконтроллере
https://robocraft.ru/blog/arduino/770.html
Ультразвуковой датчик измерения расстояния HC-SR04
Pengetahuan Dasar Таймер Untuk Pengukuran Jarak Dengan Ультразвуковой
Запуск сервопривода с помощью датчика расстояния HC-SR04 и Arduino
https://robocraft.ru/blog/electronics/772.html
Raspi-отстойника в октябре 2014 Embedded Выпуск LinuxJournal
https://www.arduino.cc/en/Tutorial/Ping
Простой искатель ультразвуковой диапазон с помощью HC-SR04
Датчик Препятствие с помощью Arduino и HCSR04
Как проверить DYP-ME007 Ультразвуковой дальномер с использованием NE555 и мультиметра
https://macduino.blogspot.ru/2013/11/HC-SR04-part1.html
https://amperka.ru/product/ultrasonic-urm37
https://image.dfrobot.com/image/data/SEN0002/URM04V2.0Mannual1.1.pdf
RCW-0012 Ультразвуковой Модуль Расстояние Измерительный Преобразователь Тест Модуля Индикации
https://www.farnell.com/datasheets/81163.pdf?_ga=1.169892256.1853603956.1478607467
Docfoc.com-Makalah Sensor HC-SR04
Использование ультразвукового дальномера
Пьезоэлектродвигатели
Пьезоэлектрический преобразователь как альтернативный источник энергии
Пьезоэлектрические преобразователи в ультразвуковой диагностике
Импульсные ультразвуковые сонары открытого типа
Пьезо-сенсор стука на Arduino UNO
Ultrasonic Sonar Ranging IC — PW0268

