

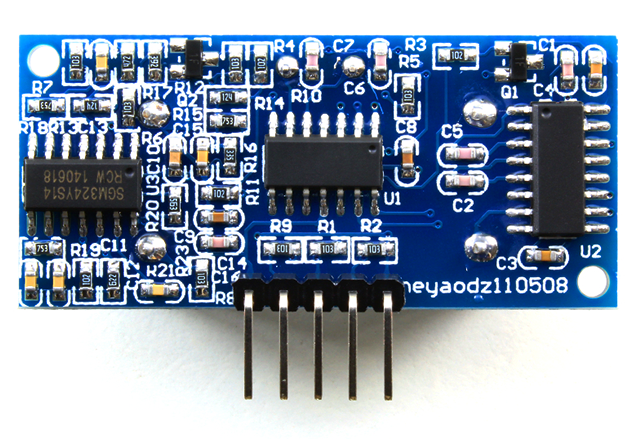
C++| Arduino IDE | ESP8266. Описание контактов ультразвукового датчика HY-SRF05 :
1 — VCC для питания 5 В
2 — TRIG Вход сигнала триггерного управления
3 — ECHO Выход эхо-сигнала
4 -OUT Выход цифровой есть/нет (при использовании модуля для сигнализации при обнаружении препятствия или присутствия человека)
5 -GND для земли
C++| Arduino IDE | ESP8266. Характеристики модуля ультразвукового датчика HY-SRF05 :
Ультразвуковой датчик дальномер HY-SRF05 обеспечивает бесконтактное дистанционное зондирование от 2 см до 450 см, с точностью измерения до 3 мм. Модуль включает в себя ультразвуковой передатчик, приемник и схему управления.
C++| Arduino IDE | ESP8266. Основной принцип работы ультразвукового датчика HY-SRF05 :
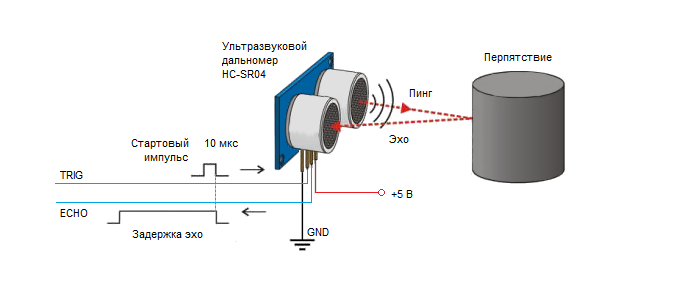
(1) На вход TRIG подаются импульсы длительностью не менее 10мкс;
(2) Эти импульсы запускают работу встроенного в модуль микроконтроллер, который формирует и отправляет 8 импульсов с частотой 40кГц на ультразвуковую керамическую передающую антенну, и автоматически принимает приходящий эхо сигнал от приемной керамической антенны;
(3) Расстояние до объекта сканирования вычисляется по формуле:
Измеренное расстояние = (T (время перемещения ультразвуковой волны-импульса до объекта и обратно) * (340 м/сек)) / 2. Где 340 м/сек скорость звука в воздухе, которая зависит от температуры, поэтому это необходимо учитывать, если Вам необходима точность измерения расстояния до объекта сканирования.
C++| Arduino IDE | ESP8266. Программа (Scetch) на языке С ++ (язык «Wiring» для Arduino) для ультразвукового датчика HY-SRF05
Протестировано с помощью HY-SRF05, HC-SR04
Предполагая, что температура в помещении составляет 20 градусов по Цельсию
Схема:
* Подключение VVC датчика, подключенного к + 5 В
* Подключение GND датчика, подключенного к земле
* Соединение TRIG датчика, подключенного к цифровому выходу 12
* Подключение ECHO датчика, подключенного к цифровому выходу 13
* / const int TRIG_PIN = 12;
const int ECHO_PIN = 13;
void setup() {
// инициализировать последовательную связь
Serial.begin(115200);
pinMode(TRIG_PIN,OUTPUT);
pinMode(ECHO_PIN,INPUT);
}
void loop()
{
long duration, distanceCm, distanceIn;
//Задаем короткий импульс LOW заблаговременно, чтобы обеспечить чистый импульс HIGH:
digitalWrite(TRIG_PIN, LOW);
delayMicroseconds(2);
digitalWrite(TRIG_PIN, HIGH);
delayMicroseconds(10); digitalWrite(TRIG_PIN, LOW);
duration = pulseIn(ECHO_PIN,HIGH);
// Преобразуем время в расстояние
distanceCm = duration / 29.1 / 2 ;
distanceIn = duration / 74 / 2;
if (distanceCm <= 0){ Serial.println("Out of range");
}
else { Serial.print(distanceIn);
Serial.print("in, ");
Serial.print(distanceCm);
Serial.print("cm");
Serial.println();
}
delay(1000);
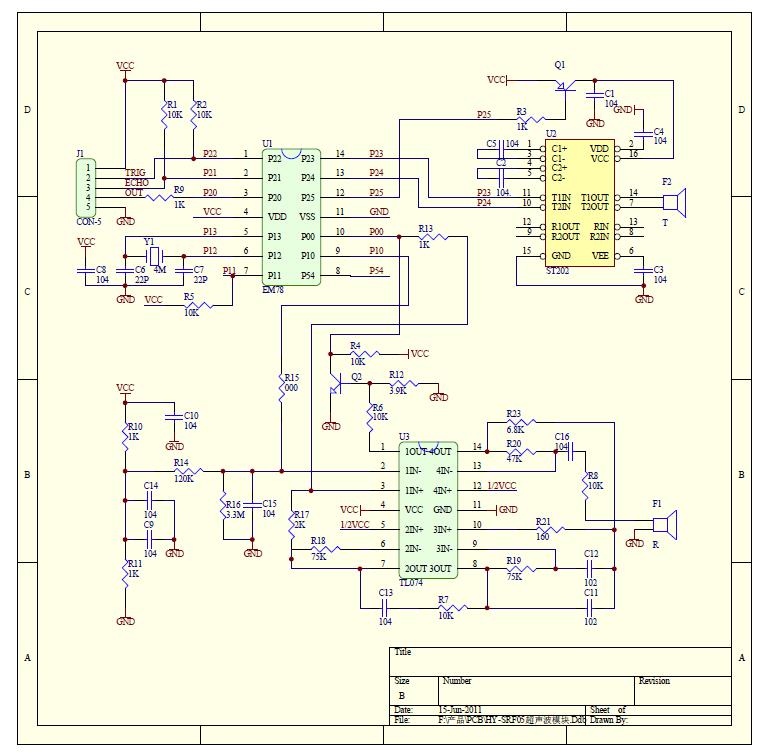
} C++| Arduino IDE | ESP8266. Принципиальная схема модуля ультразвукового датчика HY-SRF05 :
C++| Arduino IDE | ESP8266. Сравнение самого известного модуля ультразвукового датчика HC-SR04 с модулем ультразвукового датчика HY-SRF05 :
| HC-SR04 | HY-SRF05 | |
| Рабочее напряжение | 5 В постоянного тока | 5 В постоянного тока |
| Статический ток | <2 мА | <2 мА |
| Выходной сигнал: | Электрический частотный сигнал, высокий уровень 5В, низкий уровень 0 В | Электрический частотный сигнал, высокий уровень 5В, низкий уровень 0 В |
| Угол датчика | <15 градусов | <15 градусов |
| Расстояние обнаружения (заявлено) | 2 см-450cm | 2 см-450cm |
| точность | ~ 3 мм | ~ 2 мм |
| Входной сигнал запуска | Импульс 10us TTL | Импульс 10us TTL |
| Эхосигнал | выходной сигнал TTL PWL | выходной сигнал TTL PWL |
| Входы/Выходы |
|
|


В начале статьи в описании неправильно указана последовательность пинов.
Спасибо большое! Что хоть кто то читает мои рассказы внимательно 😉 . Исправил.